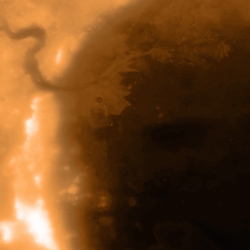
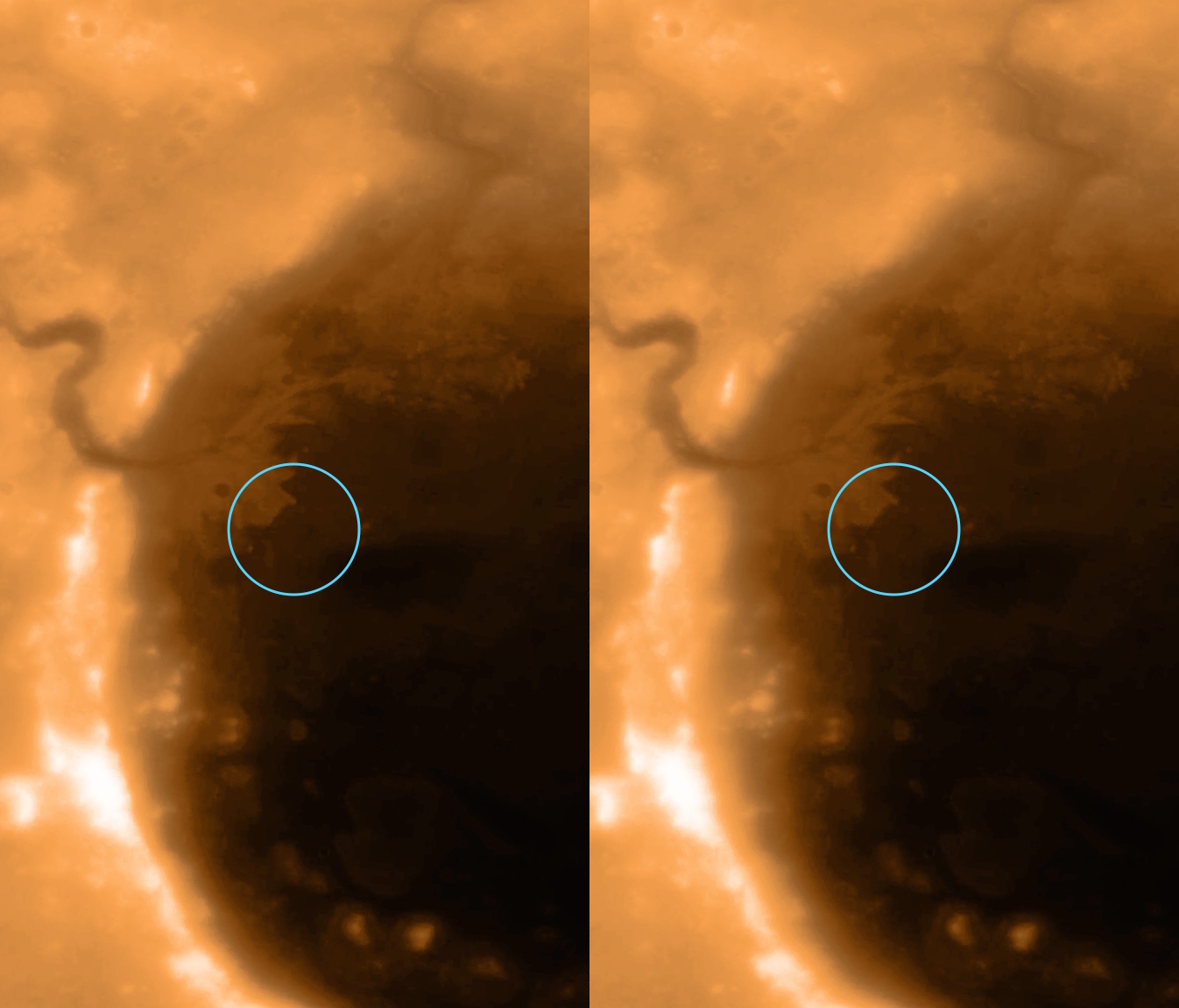
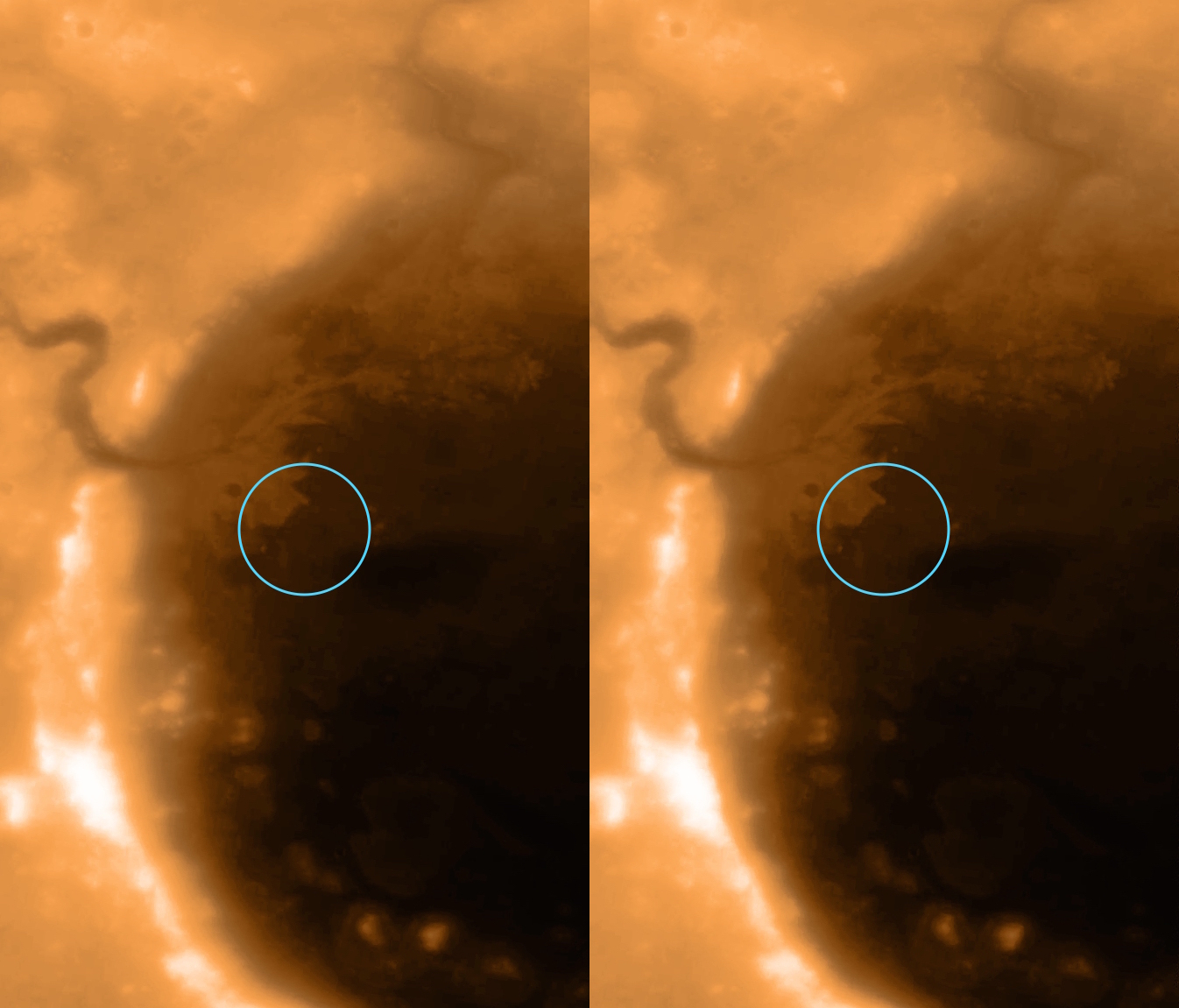
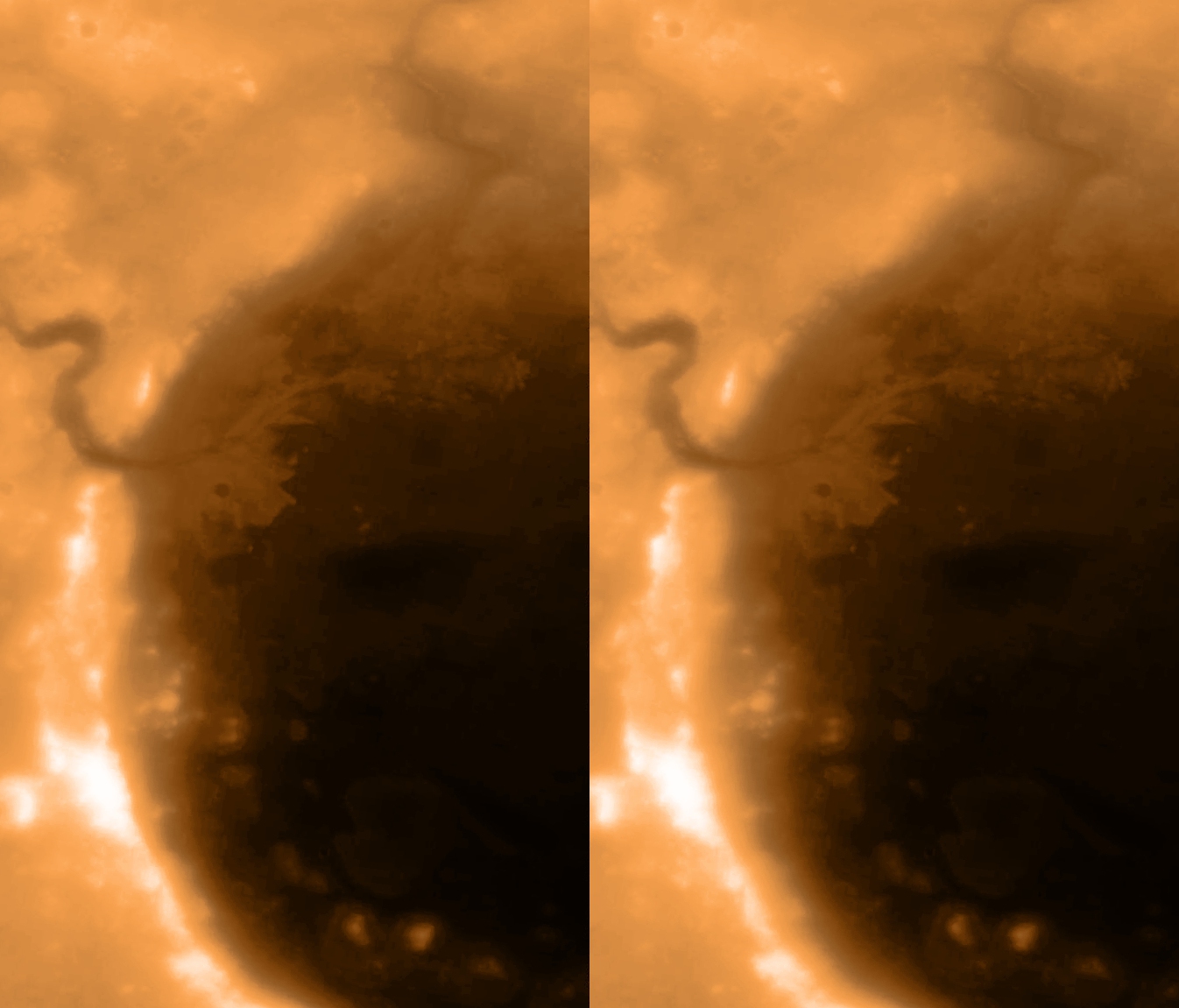
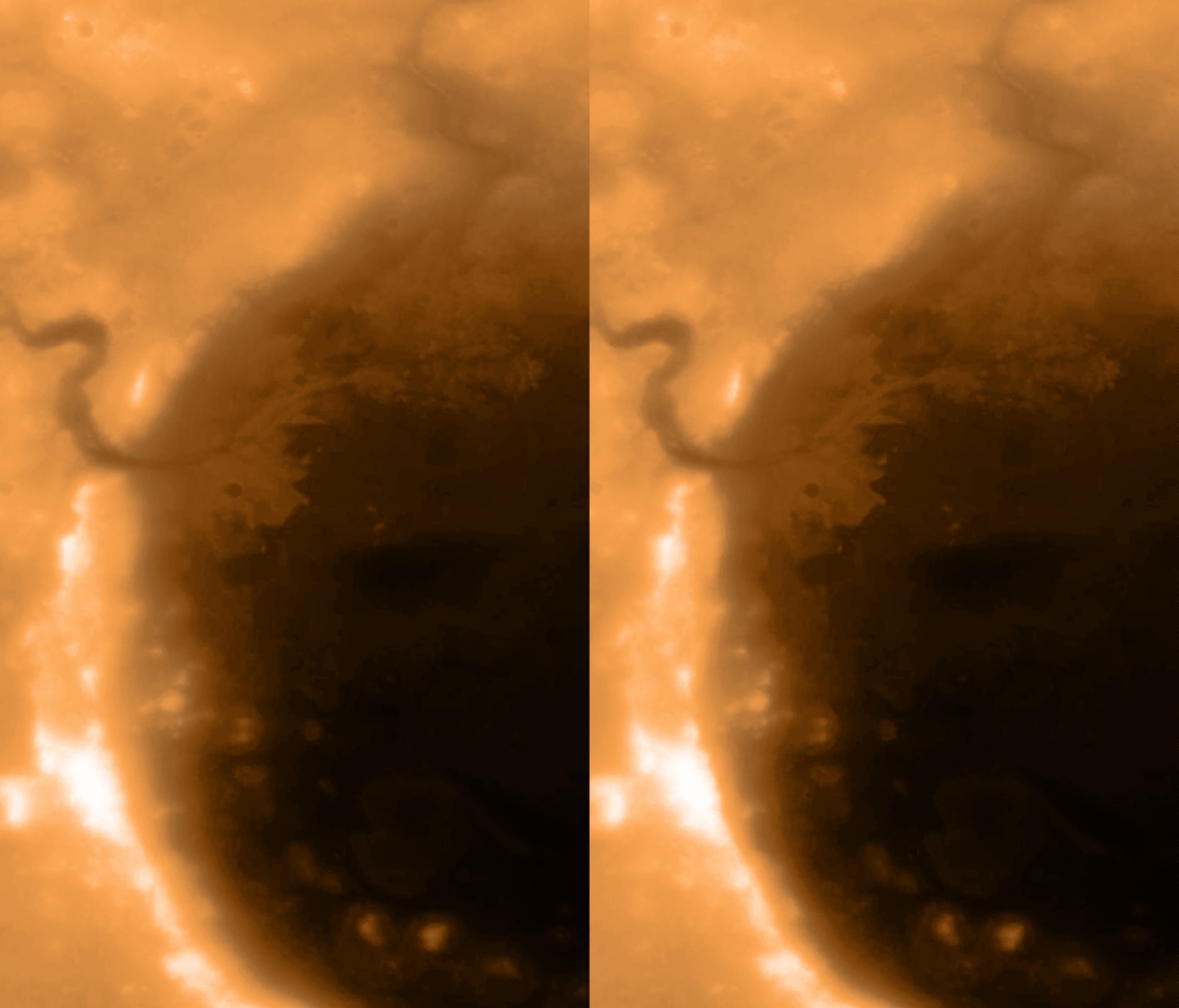
Earlier today, NASA’s Perseverance Rover successfully landed inside Jezero Crater on Mars!!! This area was chosen because scientists believe the crater once contained a lake (possibly conducive to microbial life!) created more than 3.5 billion years ago when a river channel broke through the crater wall, as you can see at west in this imagery.
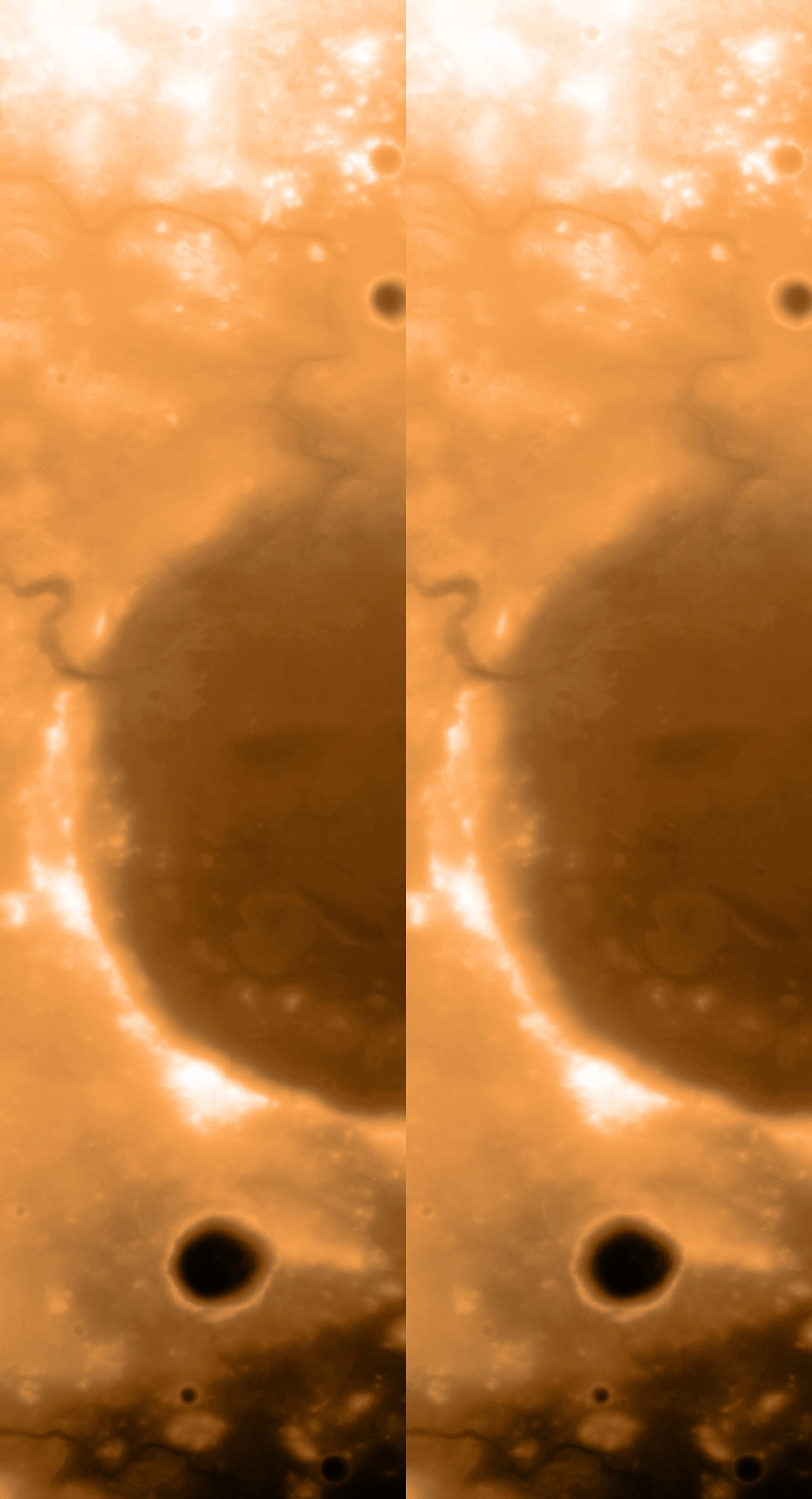
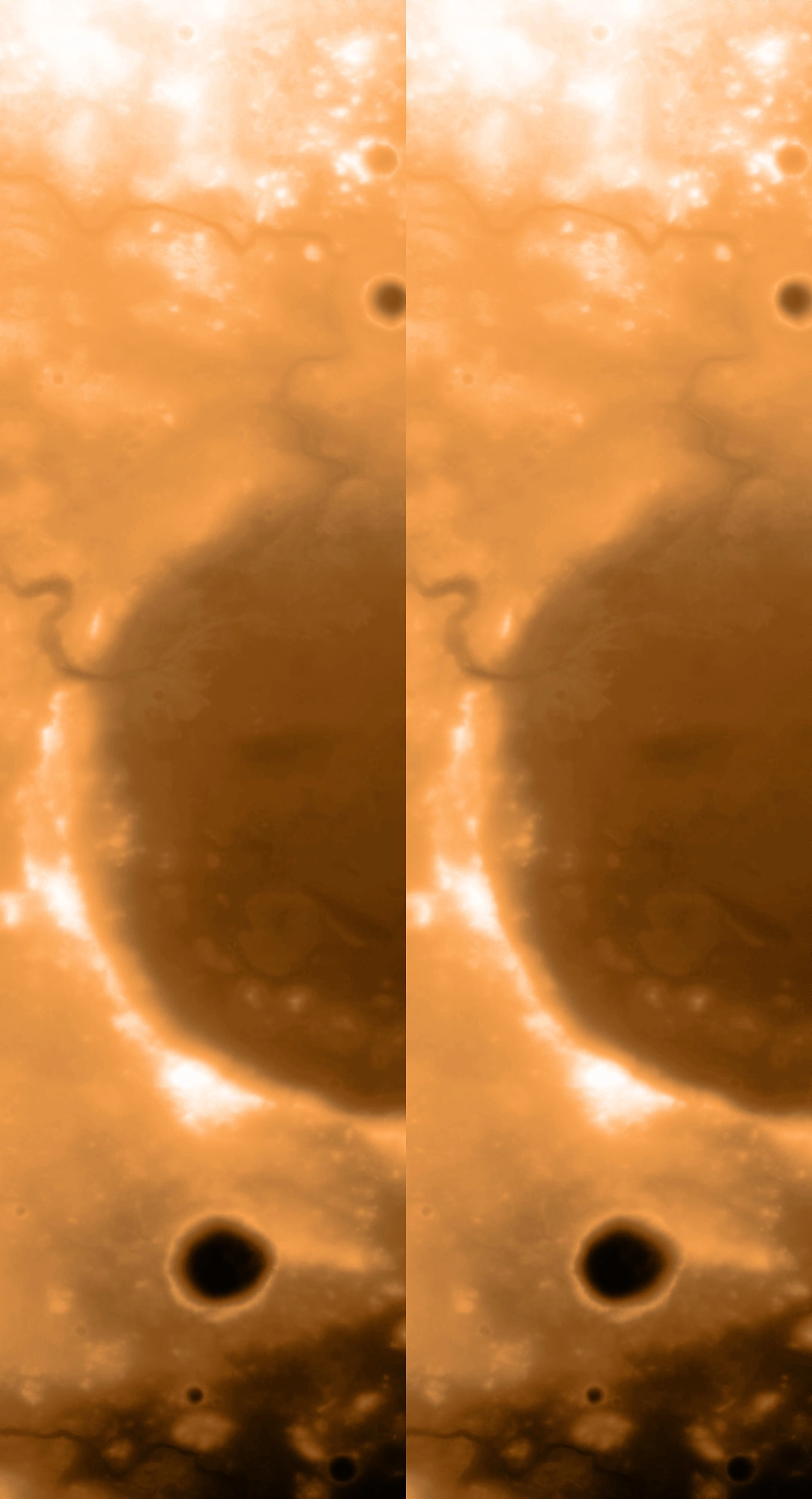
I made these false-color images and videos starting from a digital terrain model (DMT; aka Digital Elevation Map, DEM)—in essence, a depth map—which itself was produced from a pair of images from the Mars Reconnaissance Orbiter’s Context Camera (CTX), and released by Robin L. Ferguson et al. in 2017. So I worked backwards to recreate stereopairs 😁 FYI, for these viewing purposes, the apparent depth is of course exaggerated many times over.
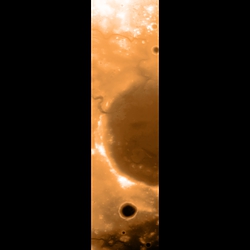
To make the videos, I ran the false-color 2D image plus depth map through the 3D-Photo-Inpainting AI, which produced the 2D second video here. It also produced a 2D panning video, from which I extracted and created the first 3D stereovideo here. The 3D stills, meanwhile, I made with StereoPhoto Maker; the second image shows the approximate landing site of Perseverance Rover.
The final stereovideo is a bonus experiment, which starts flat and adds depth as it zooms in.
TAGS: AI > 3D-Photo-Inpainting; depth maps; experiments; Mars > Jezero Crater, Mars Reconnaissance Orbiter, Perseverance Rover; terrain > digital elevation maps, digital terrain models
?Subject=2/18/21">Leave a comment
<< KeystoneDepth & AI First 3D Views from Perseverance Rover! >>